Overview
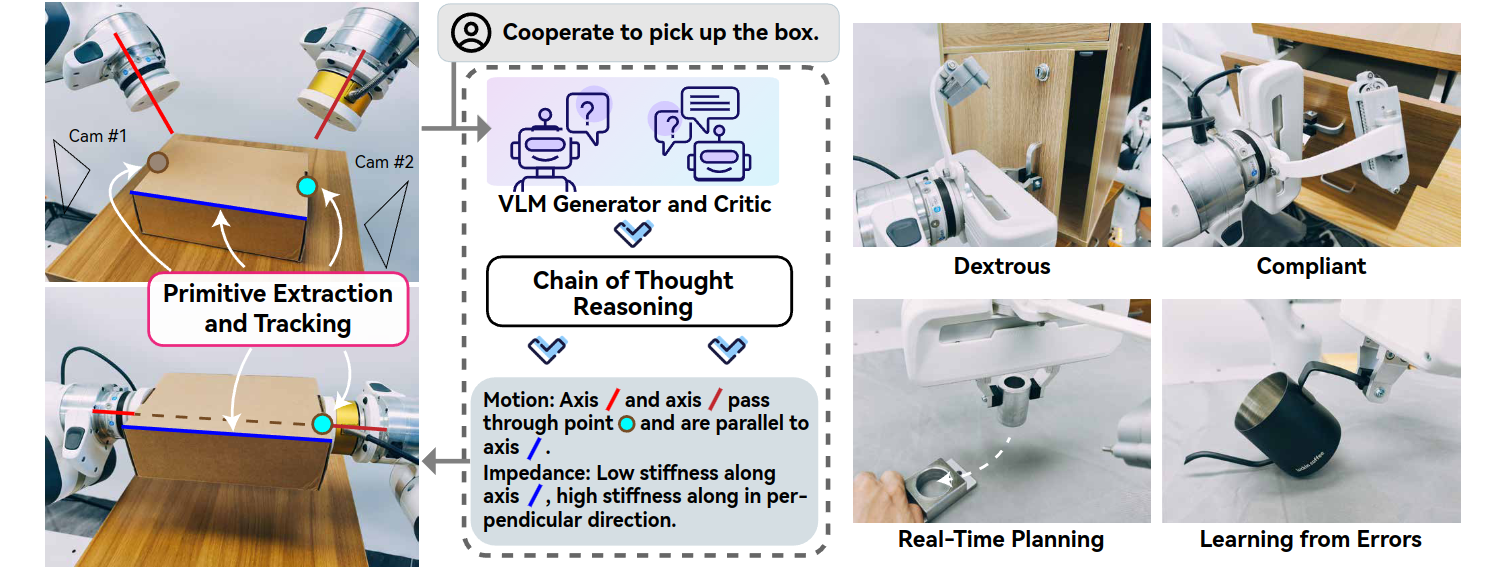
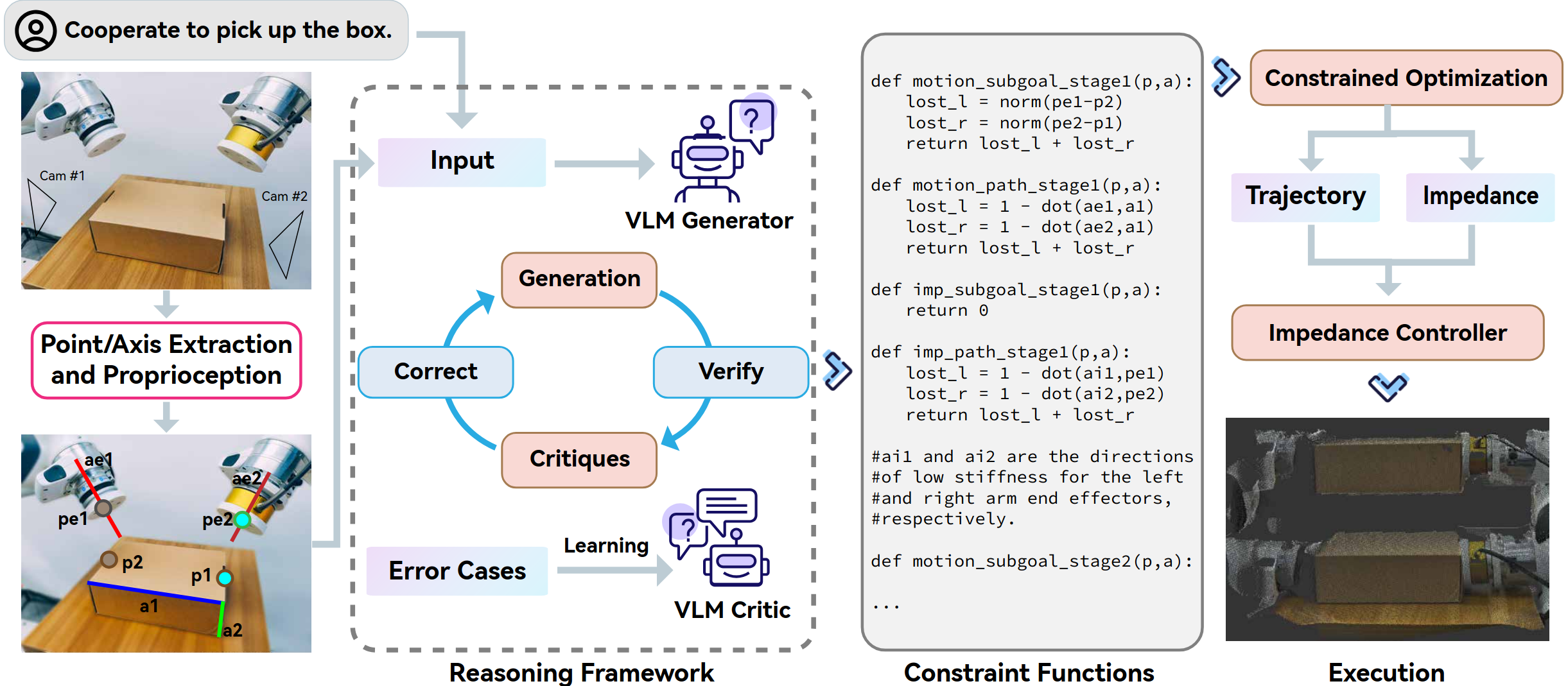
Developing robotic systems for unstructured and contact-rich environments presents significant challenges, necessitating advanced dexterous motion planning, compliant interaction control, and spatio-temporal coordination. To address these, we introduce PACR (Point-Axis Constraint Reasoning), an unified framework that encodes robot trajectories and impedance profiles via constraint functions parameterized by point-axis primitives, extracted from multi-view RGB-D camera observations. This enables joint optimization of motion and impedance within a shared mathematical framework. For enhanced robustness, we implement a dual-agent Vision-Language Model (VLM) system: a Generator employs Chain-of-Thought reasoning to formulate constraints, while an adversarial Critic validates them, significantly mitigating hallucination risks. Integrated with the dual-agent system, the framework also features an error backtracking mechanism, enabling dynamic adaptation by learning from failures. Extensive experiments across diverse manipulation tasks reveal that PACR achieves a 61% success rate (compared to 37% for baseline methods) and reduces the average contact forces, demonstrating broad applicability through zero-shot generalization without task-specific training.